
Lake ConroeでROV調査 [ 海底調査]
深夜便でホノルルからヒューストンへ。
そこから車で1時間ほど北にあるレイク・コンローまでやって来た。
ホテルにチェックインしてすぐに現場へ。

けど天気最悪!
気温なんか4度だって!?(>_<)
しかも湖の上なので体感温度は多分もっと低い。
雨は降るわ、風は強いわ。。。

今回お世話になった船。
風が強く、湖なのに波がけっこうあって船超揺れまくりでゲロゲロ。
胃の中のもん全部吐き出してもなお吐く。
もはや胃液と涙しか出てこない。
今までで最悪の乗船経験。囧rz
でも、経験豊富な調査員二人も吐いてたので、それだけ荒かったということか。
ま、なんとかデータ取れたので良かったけど。
ま、なんとかデータ取れたので良かったけど。

今回使ったROVはSeabotix社のvLBV900。
小型のROVなのに水深900mまで潜ることができる。
まぁ、小型だけあってパワーはあまりないけど。

ROVを操作するクライアントのロン。
右側2つのスクリーンに映しだされているのが、うちのソフト。
ROVに搭載されたFoward Looking Sonar (FLS:前方監視ソナー)
のデータをリアルタイムでマッピングしていくもの。
これが実は画期的なもので、今までFLSは音響ビデオカメラといった
使い方しかできず、再生するか、画面のスクリーンショットを撮るしか
使い道がなかったものを、地形図という形でマッピングすることを可能
にした業界初のソフトなのだ。
できたばかりのソフトで、今回は売り込みしつつ実戦テストをしている。
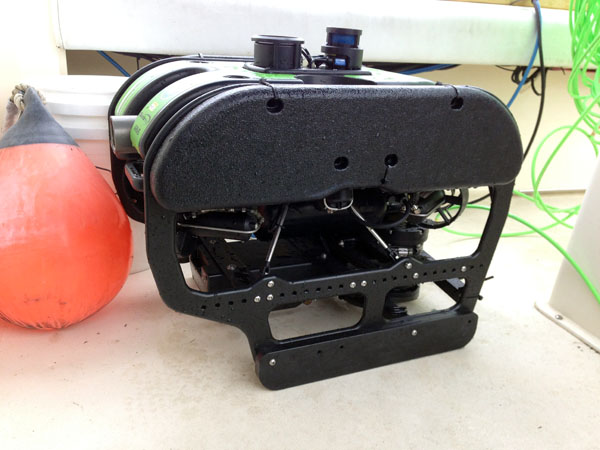
ROVを横から見た様子。

下側を見ると、左側の4つ丸のセンサーがDVL (Doppler Velocity Log:
ドップラー速度計)、右側の横長の四角いセンサーがTritech社のGemini
FLS、そしてその間にあるのが、FLSのマッピングを可能にする今回の
テストのキモとなるINS (慣性航法装置)。
今回のテストでは、このINSに問題があって、正しいマッピングができなかった。

これは二日目にテストを行った結果。
桟橋に沿ってROVを移動させ、50mほど進んだら180度ターンして
桟橋沿いに戻ってくる。そして、またターンして進んで、戻ってくる
というのを繰り返していったわけだけど、画像を見て分かるように、
反転するたびに30度ほど方位がズレて、地形図が重ならない。
ん~、こいつは問題だ。
残念ながら、INSの製造会社に問い合わせても明快な回答が得られず。
急遽新しいユニットを送ってもらうことになったようだが、僕はもう明日
帰るので、最後まで見届けることができない。。。
ま、ソフトのせいではないので僕は気が楽だけどね。笑
ちなみにレイク・コンローは町を水没させて作った貯水湖らしく、湖底には
今でも昔の街の道路や橋などが残っている。今回はROVにFLSを搭載
して、こういった構造物を映すのが目的で、データに収めることができた。
ただし、INSが正確に動作していないため、位置の情報がめちゃくちゃ
なので、結局地形図としてはあまり役に立たないのが残念だ。




おはようございます!
ヒューストン・・・聞いたことはありますが
アメリカなんだな~としみじみしながら拝見しました☆
船酔いはつらいですね。
自分は遊覧船でもケロケロします^^;
by ちゅんちゅんちゅん (2014-07-04 07:06)
お早うございます。
船酔いは辛いですね〜(-。-;)
by yakko (2014-07-04 09:06)